SatOS Application Developer Guide¶
The SatOS SDK provides libraries, tools and documentation that support developing satellite on-board applications for use with SatOS (TM) from Antaris, Inc. This enables effective development and testing of payload applications, which handle communication with core spacecraft services as well as payload-specific devices.
Using the SatOS SDK¶
Developers should use this guide to understand how to access SatOS services while developing a payload application.
As a starting point, one should consult the ACP User Guide (available through ACP Support Portal) and experiment with a demo payload application: https://github.com/antaris-inc/SatOS-Payload-Demos. The demo apps can be used as a starting point for any new Payload Application.
Glossary¶
Payload: an entity operating onboard a satellite, directly supporting mission objectives.
Antaris Cloud Platform (ACP): the cloud-based SaaS platform developed and operated by Antaris. ACP is used to drive development, simulation and operation of satellites.
Payload Developer: an individual working with the Antaris Cloud Platform to develop, deploy and operate a payload.
SatOS SDK: toolkit containing source code libraries and documentation used by Payload Developers to access SatOS services.
**SatOS Application **: software developed typically by payload developers which operates its Payload Device or/and uses Edge hw/sw for data processing, interacts with SatOS for flight services and executes overall mission business logic.
Payload Sequence: a discrete operation implemented by a PA to execute mission objectives. Payload Sequences are triggered via Telecommands through ACP.
Telecommand: an imperative command sent from an operator to a satellite representing a logical action to be taken. Examples include “point towards the ground”, “establish X-band radio connection”, and “execute XYZ payload sequence”. Telecommands may be executed on-demand during a ground contact, or they may be scheduled for execution over time. Typically, Telecommands are executed via higher-level abstractions such as Tasks.
Application Host: the physical onboard compute system with CPU, memory, storage and I/O connectivity for Payload Devices. Antaris reference bus architecture has two of them (QA7 and NVidia Jetson). It hosts Payload Applications and various system services.
Application Controller (AC): control software that manages operations on the Application Host and acts as a gateway to flight services provided to Payload Applications.
SatOS Interface: API enabling bidirectional communication between Payload Applications and the Application Controller.
Payload Device: a physical device provided by a Payload Developer that is physically connected to the Application Host via one of the designated interfaces (Ethernet, I2C, UART, USB, SPI, etc).
Device Driver: a general term used to describe any software supporting direct access to or manipulation of a Payload Device. A driver typically supports one or both of the following:
General Device I/O: having generic knowledge about mechanisms to communicate with hardware entities using a particular interface type (e.g. USB, UART etc.), or
Device-specific capabilities: having knowledge of the Payload Device specifics and exposing abstracted interfaces for higher level software, while encapsulating the device details
System Architecture¶
A developer is responsible for a Payload Application and a Payload Device – effectively everything highlighted in blue below:
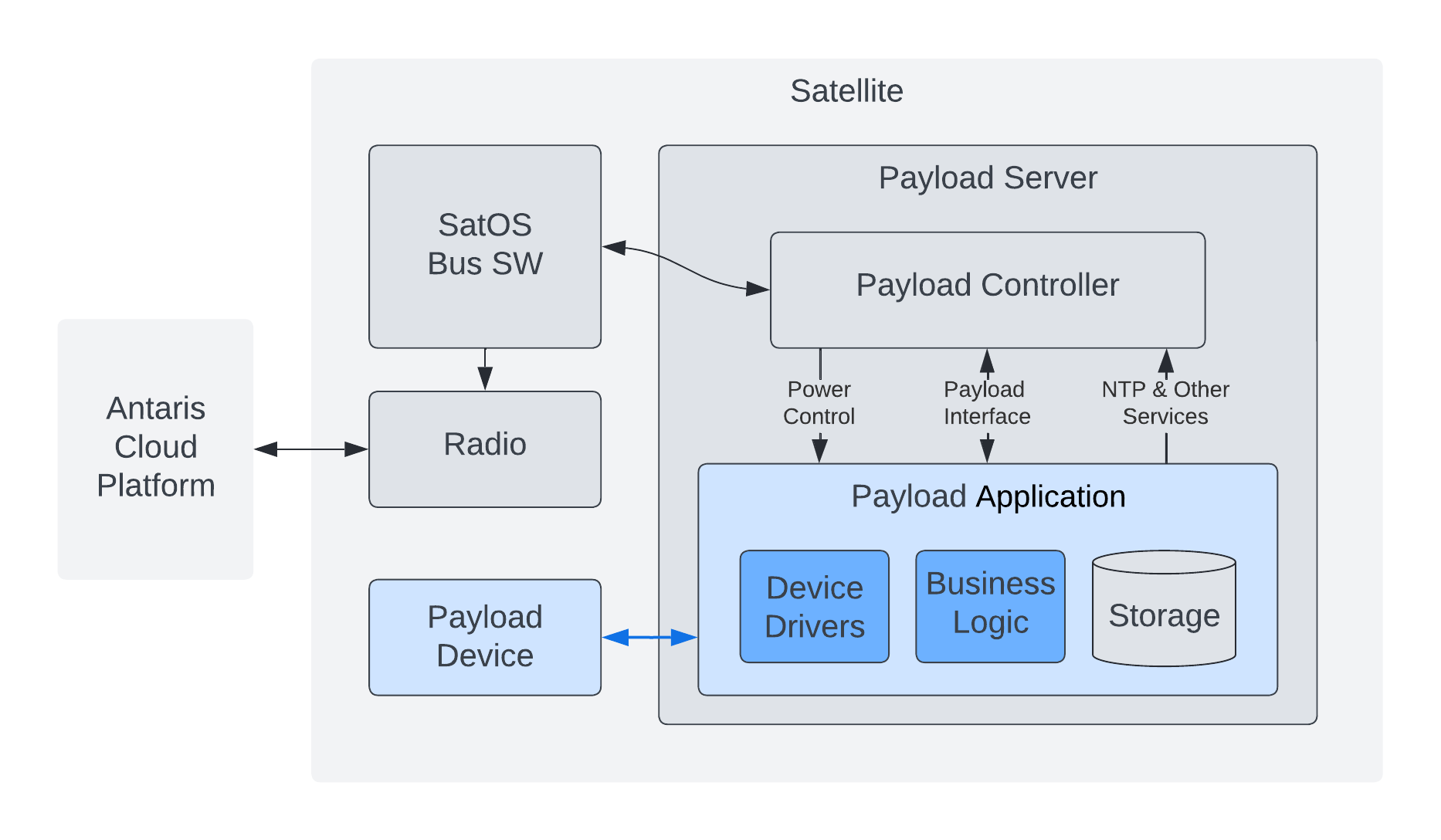
Payload Applications contain payload-specific business logic and any device drivers necessary to interact with a Payload Device. Storage is made available to the application that persists across reboots or unexpected failures.
While active, a Payload Application has full control over its associated device and may interact with the SatOS (spacecraft controller) via the SatOS Interface APIs. This allows Payload Applications to coordinate with the onboard scheduler, emit telemetry/teledata for downlink, implement health checking, etc.
The Spacecraft Controller (SatOS) manages all communication with ACP, typically via radio communication with ground stations. This is the control and data path for onboard payloads.
Application Design¶
A SatOS Application encompasses all software operating within the Application Host, usually for a single payload, including all necessary application-specific software and system libraries. SatOS Applications are packaged as container images, and the environment within which the containers are executed is orchestrated by the Application Controller.
This section of the SDK guide explains how a developer should think about design and implementation of a Payload Application.
Application Operation¶
When a Payload Application is scheduled to be active for a given period of time, a simple state machine is executed:
Payload Device is powered on
Payload Application is booted up by Application Controller
Payload Application starts via developer-provided entrypoint script
Payload Application initializes a Payload Interface connection (typically using an appropriate SDK library)
Application Controller instructs Payload Application to execute required Payload Sequences
Payload Application acknowledges when sequences are complete
Application Controller stops application, with time allowed for graceful shutdown
Payload Device is powered off
Payload Sequences¶
A Payload Sequence represents a discrete unit of work, and usually maps to specific manipulation of a payload device in accordance with mission objectives.
Payload Sequences are scheduled by SatOS based on the on-board schedule generated & uploaded to satellite by the Antaris Cloud Platform. Examples of this include “when the satellite is within range of X,Y coordinates” or “twice per orbit during the local day time”. Any geographic triggers (ground target pointing, enter/leave bounding box, etc.) are resolved within ACP before Payload Sequences are executed.
Payload Applications are instructed to execute Payload Sequences using the SatOS Interface. Payload Applications are not “always on”, and will only be booted up when its sequences are to be executed. Sequences are always given a duration within which they are expected to run, and are not able to run forever.
Dynamic/on-demand interaction for active debugging and diagnosis is supported directly via ACP.
File Upload & Download¶
File uploads are facilitated by ACP. Uploaded files are made available at a pre-determined location in a Payload Application’s storage space. Keep in mind that radio uplink bandwidth is typically limited, so it is wise to minimize upload file size and to consider piecemeal update processes.
File downloads are typically initiated in response to creation of some mission-oriented data by the Payload Application and/or Payload Device. A PA must inform the satellite that files are ready to be downloaded using the SatOS Interface. After notification, files can then be automatically downlinked to the ground and distributed to mission operators.
Application Upgrades¶
A typical Application upgrade flow would look like following :
Incremental change in Application docker container (lets call it upgrade_artifact) created at ground by application developer. Antaris provides necessary tool to do that.
Operator uses File upload task in ACP to uplink the upgrade_artifact to onboard storage.
After upgrade_artifact is uploaded successfully, Operator should send Application Upgrade Telecommand (TC 610), which results in updating the application conatiner image. More details regarding this is available in Operator’s manual.
Application Environment¶
This section describes the runtime compute environment an Application will operate within.
Configuration¶
Application environment configuration is available (as readonly) as /opt/antaris/app/config.json file. It helps to automate Application environment configuration by Application Controller. Above file is managed by the system and is readonly to the running application processes.
Compute & Storage¶
All Payload Applications are deployed as docker containers. CPU, memory resources, storage are pre-configured during satellite configuration.
All storage is persistent and will maintain state across reboots. Access to application storage is provided via the following filesystem mounts:
/opt/antaris/outbound/: contains files produced by the PA that are intended for downlink during a ground station contact/opt/antaris/inbound/: contains files uplinked and made available to the PA. The PA has readonly access of this folder./opt/antaris/workspace/: available to be used as a scratch space or sandbox, supporting active operation of a PA. The PA has full read/write permissions.
Network¶
Each Payload Application container is configured with a unique IP Address, as do any associated Payload Devices connected over IP network. The Application Controller and an NTP server are also available over this network. The IP addresses of all these resources are defined in the PA config file (/opt/antaris/app/config.json), and should be accessed via the SDK library functions.
Device Interface Access¶
All necessary devices are exposed to the payload application natively. Devices paths and identifiers are provided by the application config (see Configuration above).
SatOS SDK library support is available to assist in reading device configuration from the config. Additional library support is also available to simplify I/O over interfaces like GPIO, CAN, UART.
Packaging¶
Application are expected to be containerized using Docker version 25.0 and above. Base docker images are available via quay.io:
Python-based applications: quay.io/antaris-inc/satos-payload-app-python:stable
CPP-based applications: quay.io/antaris-inc/satos-payload-app-cpp:stable
Examples usage of these images are available: https://github.com/antaris-inc/SatOS-Payload-Demos.
Payload Tasks & Schedules¶
A Task represents a higher-level operation, such as spacecraft station-keeping or payload manipulation. Tasks take the form of templates containing ordered sets of Telecommands. For example, a Task might be defined to point to a location on the ground and manipulate an earth observation payload:
Example Task “exec_payload_imager” (Duration = D) |
|||
|---|---|---|---|
# |
Telecommand |
Parameters |
Time |
1 |
adcs_point_nadir |
T |
|
2 |
power_on_payload |
Payload_HW_ID=7 |
T1 |
3 |
boot_payload_app |
Payload_APP_ID=4, Mode=primary |
T2 |
4 |
start_sequence |
Payload_APP_ID=4, Seq_ID=”B”, Seq_Params=“arg1”, Dur=D |
T3 |
5 |
shutdown_payload_app |
Payload_APP_ID=4 |
T3+D |
An Operator uses Tasks to construct a Schedule. Schedules contain a series of Telecommands rendered from input Tasks. A schedule typically spans one or more days, beginning some number of hours or days in the future. This is used to instruct a satellite how to autonomously operate while outside of an active ground station contact.
An example Schedule could be created from the following tasks, taking the provided Start Time and Duration as input:
# |
Task |
Start Time |
Duration |
|---|---|---|---|
1 |
execute_payload_imager |
02:00:00 |
1200 |
2 |
ground_contact_alaska |
02:24:40 |
600 |
The rendered Schedule might look like so:
# |
Telecommand |
Parameters |
Time |
|---|---|---|---|
execute_payload_imager(D=1200) |
|||
1 |
adcs_point_nadir |
02:00:00 |
|
2 |
power_on_payload |
Payload_HW_ID=7 |
02:02:30 |
3 |
boot_payload_app |
Payload_APP_ID=4, Mode=primary |
02:04:00 |
4 |
start_sequence |
Payload_APP_ID=4, Seq_ID=”B”, Seq_Params=“arg1”, Dur=1200 |
02:04:30 |
5 |
shutdown_payload_app |
Payload_APP_ID=4 |
02:24:30 |
ground_contact_alaska(D=600) |
|||
6 |
adcs_point_lat_lng |
lat_lng=61,-147 |
02:24:40 |
7 |
exec_ground_contact |
bands=s,x |
02:26:00 |
Task definition and scheduling is a collaborative, ongoing exercise. During initial payload development, it is helpful to keep the following dimensions in mind:
Task ID: an alphanumeric value assigned by payload developer (e.g. “execute_payload_imager” above)
Task Duration: the amount of time required to run the Task
Trigger Conditions: the geographic location, absolute/relative time that Tasks should be executed
Executions per Orbit/Day: the number of times a Task should be invoked within a given time period, likely per orbit or per 24-hour period
Payload Device Power State: the expected payload device power state before and during Task execution
Power Requirements: the average and max power requirements required for the Task
Using the SatOS SDK Libraries¶
The SDK provides the following programming language support:
Python: see the Python Application Guide for more information.
For CPP-based applications: a debian package named satos-payload-sdk-cpp containing CPP Payload Interface client support. This is distributed within the CPP base docker image.
Sample payload applications demonstrating usage of these libraries are available here: https://github.com/antaris-inc/SatOS-Payload-Demos.